Next: Factor graphs: Robot Localization
Up: MLA_Exercises_2011
Previous: Factor graphs: HMM model
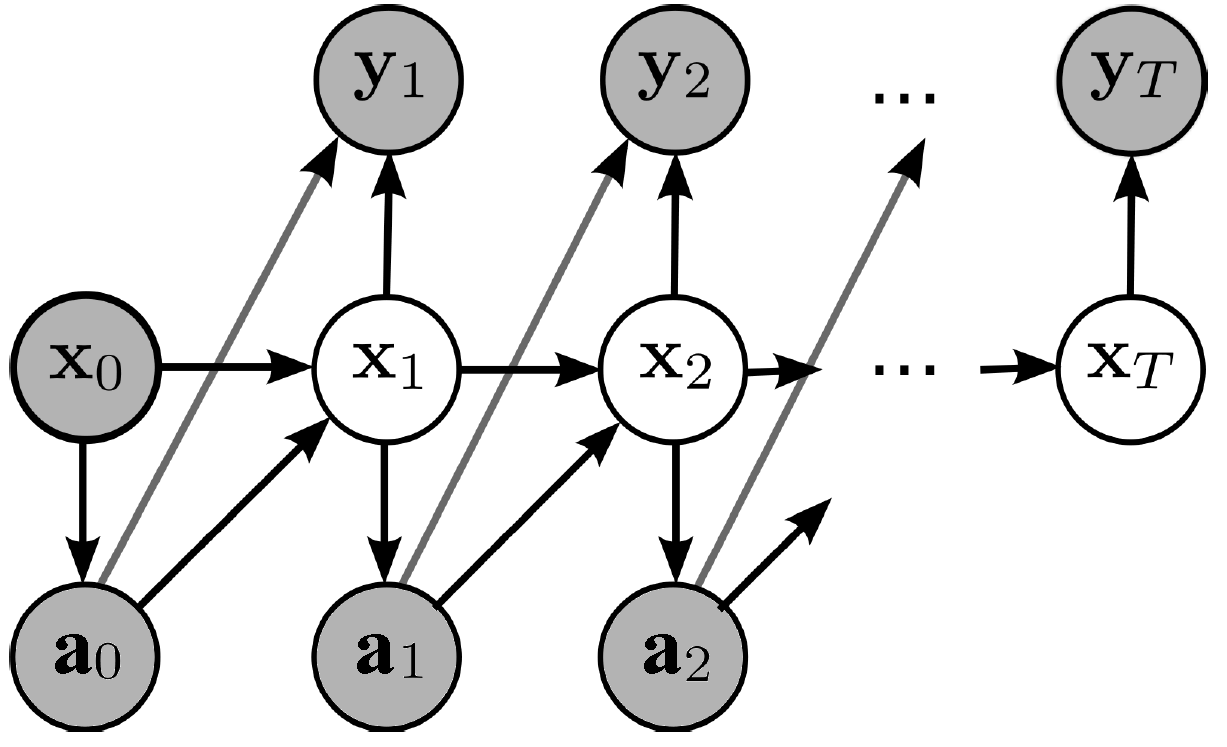
Consider the Bayesian network illustrated in Fig. 5 with the probabilities
where
 denotes the multivariate Gaussian distribution with mean
denotes the multivariate Gaussian distribution with mean  and covariance
and covariance  .
.
Figure:
Gaussian Bayesian network.
|
|
Prove that the forward messages have again the form of a Gaussian distribution
 |
(4) |
with mean
 and covariance
and covariance
 as defined on the slides for the exercise hour (slide 23). (Hint: Use the three properties of Gaussian distributions discussed in the exercise hour.)
as defined on the slides for the exercise hour (slide 23). (Hint: Use the three properties of Gaussian distributions discussed in the exercise hour.)
Next: Factor graphs: Robot Localization
Up: MLA_Exercises_2011
Previous: Factor graphs: HMM model
Haeusler Stefan
2011-12-06